Prodovzhennya razrobki valdiklis, rozpochatoy 36 pamokoje. Parašykime Peltier elemento įtempimo reguliatoriaus programą. Mes žinome, kas yra integruotas reguliatorius.
Peltier elemento aušinimo efektas atsiranda dėl elemento elektrinio slėgio. Todėl temperatūros reguliavimas kameroje atliekamas atsižvelgiant į Peltier modulių elektrinio slėgio pasikeitimą. Tobto. mums reikia reguliatoriaus be įtampos, be strumos, be sandarumo.
Panagrinėkime įtempimo reguliatorių, bet po truputį žinome minimalią informaciją apie reguliatorius.
Zagalni vіdomosti schodo regulіv.
Reguliatorius yra pagrindinis priedas, kuris palaiko objekto parametrus tam tikrame lygyje. Reguliatorius turi būti prisiūtas už objekto malūno ir vibruojamas keruyuchi dії, kad būtų užtikrintas reguliavimo parametro stabilumas.
Gerai prisimenu, kad naudojau pirmąją reguliavimo sistemą, kurią mums institute pristačiau TAU (automatinio valdymo teorija) ir bako lygio kėlimo mechanizmą. Jei tekantis vanduo pasiekia iš anksto nustatytą vertę, plūdė pakyla ir vožtuvas pririšamas prie vazelio, blokuodamas vandens tekėjimą. Jei rabarbarai pasikeis, tada plūdė nusileis ir vožtuvas atvers vandenį.
Kiekvienam reguliatoriui būtina aiškiai matyti, ką mes reguliuojame ir dėl ko reguliuojame. Tobto.
- reguliavimo parametras;
- ir reguliavimo elementas.
Reguliavimo vandens lygio reguliavimo sistemoje parametras yra vandens aukštis, o reguliavimo elementas yra vožtuvas, susietas su plūdės verte. Reshta tarp plūdės ir vožtuvo įgyvendina valdymo algoritmą.
Mūsų įtampos reguliatoriui:
- reguliavimo parametras - elektrinis įtempimas ant įtempimo;
- valdymo elementas yra impulso pločio moduliatorius.

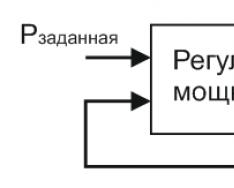
Būtina tiekti maitinimą, kuris yra mūsų sistemos reguliavimo elementas - PWM perjungimo koeficientas arba elektroninės grandinės raktinis tranzistorius. Reguliatoriaus algoritmas realizuojamas programiniu būdu. Programai valdymo elementas yra PWM slėgio koeficientas.
Svarbesni yra vibruojančios tekinimo jungties reguliatoriai, siekiant atpažinti reguliuojamo parametro frezą ir kompensuoti piktybinę apviją.
Mūsų atveju reguliatorius turi reguliuoti įtempimą pagal sistemos išvestį ir nustatyti įtempimo vertę. Vadovaudamasis algoritmu, valdiklis apskaičiuoja PWM apkrovos koeficiento reikšmę, kuriai keičiama įtampa ant įtampos.
Kaip ir visas pasaulis, reguliatorius turi kokybės vertinimo kriterijus. Tse:
- Greičio reguliavimas (greitis) - malonės reguliavimo pakeitimo į nurodytą vertę valanda.
- Reguliavimo tikslumas - atleidimas už reguliavimo parametrą stotyje.
- Reguliatoriaus stabilumas – reguliavimo parametro trukmė.
Aš daugiau. Reguliavimo algoritmą įgyvendiname programiniu būdu. Tse reiškia, kad būsime atskiras valandinis reguliatorius. Vadovybė turi būti teisinga šiuo metu ir valandą. Programų valdikliuose įtempimo reguliatoriaus valandinis diskretiškumas buvo 20 ms.
Integruotas reguliatorius.
Kitus reguliavimo dėsnius galima pamatyti artimiausiais metais, jei bus PID (proporcinis-integralinis-diferencinis) temperatūros reguliatorius. Dabar mes kalbame apie integralų reguliavimo dėsnį.
Otzhe, aš kaltas, kad padidinau įtampą prie išėjimo, keičiant SHIM. Paprasčiausias ir intuityviausias būdas:
- išlyginti duotąją įtampą nuo vytulio;
- jei nustatysite reikšmę, didesnę už tikrąją, tada PWM bus padidintas 1;
- Jei nustatote mažesnę reikšmę nei tikroji, pakeiskite PWM į 1.
Reguliatorius su tokiu valdymo algoritmu yra pracyuvatime, jis nėra reguliavimo kokybės kriterijaus viršuje. Ir, absoliučiai viskas.
Norint atlikti menkiausią reguliavimą, prie dabartinės PWM vertės vertės reikia pridėti reikšmę, kuri turėtų būti išsaugota reguliavimo parametro atleidimo lange.
Matematiškai integralinio valdiklio valdymo dėsnis atrodo taip 
- Kw - užpildymo koeficientas PWM;
- Ki yra integralinis koeficientas;
- e(t) yra atleidimas už nepatogumus, tobto. skirtumas tarp mes jį nustatome su tikrosiomis reguliuojamo parametro reikšmėmis.
Integralinio valdiklio išvesties funkcija yra proporcinga integralui per reguliavimo parametro valandą.
Integruotas valdiklis yra nuoseklaus artumo valdiklis. Atleiskite puiku – laimėkite ShІM palaiminimus su puikiais krokais. Atlyginti užtenka nedidelio atleidimo už vynus. Atleidimas kaupiamas integratoriuje ir tai nebus kaip mažas laimėjimas, vis tiek valandai, tai atitinka reguliavimo elementą.
Sumanesniam protui, artimam diskretiškam įgyvendinimui, integruoto valdiklio grandinė atrodo taip.

- Atleidimas už nepatogumus apskaičiuojamas kaip skirtumas tarp nurodytos įtampos Pset ir mirties prie išėjimo Preal: e = Pset - Preal.
- Atleidimas už nepatogumus dauginamas iš integralo koeficiento Ki ir kaupiamas registro-integratoriaus RgI.
- Registro iškrovimų skaičius turėtų būti siunčiamas į impulso pločio moduliatorių.
Paprastai integratorius gali pasiekti daug padalijimų iš trupmeninės dalies. Ir WIM gali įgauti tik dar vieną reikšmę. Čia nėra paviršutiniškumo. Vertės, mažesnės nei vienas žingsnis po žingsnio, kaupiasi integratoriuje ir pereina iš visos dalies, taigi ir į WIM. Tse leidžia atleisti nedidelius nepatogumus arba mažą Ki reikšmę keičiant reguliatoriaus kodą. Mažesnės vertės ilgą laiką pereina į visą dalį.
Integruoti valdikliai gali:
- didelis tikslumas;
- mažo greičio reguliavimas;
- viduryje stіykіstyu, mokyklų mainai atsigulti į vіd shvidkostі reglamentą.
Kodėl mes pasirinkome Peltier elemento įtempimo reguliatorių kaip integruotą valdymo dėsnį.
- Peltier elementas keičia šaltumo ir temperatūros parametrus. Ale, atrodo, labiau tinka. Mums tiesiog nereikia švediško reguliatoriaus.
- Be to, staigus Peltier elemento slėgio pokytis lemia modulio laidininkų kristalų degradaciją. Dėl staigių temperatūros pokyčių laidininkų jungtyse susidaro mechaniniai įtempimai, dėl kurių sumažėja elemento efektyvumas ir jis išeina iš harmonijos. Todėl nekeičiant temperatūros reguliatoriaus, būtina nustatyti įtempimo reguliatoriaus reikšmę, kad Peltier elemento įtempimo keitimas būtų atliktas sklandžiai.
- Taip pat reguliatoriaus išėjime yra didelės talpos kondensatorius, kuris taip pat geriau tinkamai įkraunamas.
Pavyzdžiui, kai šildymas įjungiamas su neaušinama šaldytuvo kamera, temperatūros reguliatorius yra kaltas dėl elemento pasukimo į žemiausią temperatūrą. Nebhіdno, schob tse tapo ne mittevo, o kelių sekundžių ruožas.
Visiems jiems idealiai tinka pats integruotas reguliatorius. Be to, Ki koeficientas yra specialiai sumažintas, kad būtų užtikrintas pakankamas įtempimo pokytis.
Įtampos reguliavimo programa.
Reguliatorius dodamo į programą nuo kitos pamokos. Spėju, kad juose jie sukūrė programos valdiklio struktūrą ir įgyvendino įtampos, strumos ir įtempimo sandarumo mažinimą.
Mums reikia pažangių pokyčių ir konstantų:
plūdinis matasP; // dingstanti įtampa, W - tsya jau pasikeitė programoje є.
float setPower; // nustatytas slėgis
floatregPwrInt=0; //
#define koeffRegPwrInt 0.05 //
Pats reguliatorius telpa vienoje eilėje:
Taip pat turiu atnaujinti visą PWM integratoriaus dalį:
analogWrite(9, (unsigned int) regPwrInt); // PWM
Iš principo programa jau veikia. Galite nustatyti brangesnį laiko intensyvumą, pavyzdžiui, 5 W:
setPower = 5; // laikinas slėgis nustatytas į 5 W
Įdėkite reguliatorių 20 ms ciklui ir patikrinkite. Bet daugiau operacijų nėra.
Integratoriaus mainai.
Praktikuojame pagal realią schemą. Leidžiama, kad slėgis būtų nustatytas, nes reguliatorius nėra pastato apsaugos, pvz., 50 W. Reguliatorius gali sudaryti didžiausią PWM. Tačiau neatsiejama mūsų reguliatoriaus dalis ir toliau auga. Jei neįmanoma viršyti didžiausios leistinos PWM reikšmės (turime 255), PWM nebeveiks tinkamai. Shvidshe kartus iki 0 ir vėl dažniau zbіlshuvatisya. Tobto. būtina pasirūpinti integralios linijos aptvėrimu. Nėra kaltas, kad didžiausia WIM vertė yra didesnė ir yra nepriimtina, todėl ji tampa neigiama.
if (regPwrInt< 0) regPwrInt=0; // žemiau
if (regPwrInt > suteršdamas žvėrį
„Negyva valanda“ ShІM.
Yra dar viena darbo su ShІM subtilybė. PWM išvesties impulsai mirksi tikruoju klavišu. Pasikeitus užpildymo koeficientui, rakto didinimo impulsai gali dar trumpėti. Mūsų PWM vertė 1 suteikia impulso trivalumą 62,5 ns. Per tokią trumpą valandą raktas vėl nesugenda ir paprastai neveikia. Geriau viskam, su mūsų žemos įtampos valgiu (12 V) sunku neprisigerti. Tačiau aukštos įtampos pistoletuose gyvybė (300 ir daugiau) sukelia tokį perjungimą ir sukelia katastrofiškas pasekmes. Štai kodėl geras ShІM valdymo stilius yra tvora per trumpus keruvannya impulsus.
Pristatykime du timchasovі vіdіzki, ant kurių paimsime robotą ShІM. Vienas vіdrіzok yra arti nulio, kitas yra arti maksimalios vertės. Šių vіdrіzkіv trivališkumas vadinamas "negyva valanda" ШІМ (negyvas laikas). Paprastas algoritmas:
- Jei PWM reikšmė yra mažesnė už „negyvąją valandą“, tada PWM reikšmė yra didesnė nei 0.
- Jei PWM vertė yra didesnė už maksimalią PWM reikšmę ir „negyvąją valandą“, tada PWM vertė yra didesnė už maksimalią vertę.
Šio algoritmo įgyvendinimas programoje atrodo taip:
jei (pwm< DEAD_TIME) pwm=0;
if (pwm >
analogWrite(9, pwm); // PWM
Nustačiau „negyvąją valandą“ lygią 500 ns:
#define DEAD_TIME 8 // PWM negyva valanda (*62,5 ns)
Vimknennya reguliatorius.
Sustabdykite, ką reikia pridėti prie reguliatoriaus laidų. Sakiau, kad reguliatorius kaltas, kad tinkamai pakeitė Peltier elemento sandarumą. Alece nėra verta skubios pagalbos vimikannya. Kai setPower=0, mittvo valdiklis išjungtas.
Apskritai integruoto įtempimo reguliatoriaus programinės įrangos blokas atrodo taip:
//------------------ slėgio reguliatorius
if(setPower!=0)(
regPwrInt = regPwrInt + (setPower - meetP) * koeffRegPwrInt;
if (regPwrInt< 0) regPwrInt=0; // žemiau
if (regPwrInt > MAX_PWM) regPwrInt=MAX_PWM; // suteršdamas žvėrį
// negyva valanda PWM
unsigned int pwm = (unsigned int) regPwrInt; // Konvertuota į PWM
jei (pwm< DEAD_TIME) pwm=0;
if (pwm > (MAX_PWM – DEAD_TIME)) pwm=MAX_PWM;
analogWrite(9, pwm); // PWM
}
else (// viknennya
regPwrInt=0;
analogWrite(9, 0); // PWM
}
Serial.print("p="); Serial.print(regPwrInt, 2); // integruota slėgio reguliatoriaus juosta
Moku. Usogo 40 rublių. mėnesiui, kad gautumėte prieigą prie visų svetainės išteklių!
Pakartotinis reguliatoriaus patikrinimas ir sureguliavimas.
Dabar mes iš naujo patikriname reguliatoriaus robotą pagal tikrąjį poslinkį ir integralinis koeficientas yra reikšmingas.

Kaip valdyti reguliatoriaus vicoristovuvatimemo monitoriaus nuoseklųjį prievadą darbą. Nepamirškite nustatyti 19200 bodų greičio.
Galinėje pusėje įdėjau integralinį koeficientą, lygų 0,1.
#define koeffRegPwrInt 0.1 // Integrinis slėgio reguliatoriaus koeficientas
Paleidus paskutinio prievado monitorių, pasirodė toks vaizdas.

Reguliatorius veikia. Aš nustatysiu intensyvumą (5 W) ir sumontuosiu per 14-15 sekundžių.
Vieno rezistoriaus uždarymas. Įtampa smarkiai pasikeitė, bet reguliatorius normalizavosi per 5-6 sekundes.

Praktikuokite stabiliai. Apie pastovumą, reikia nešioti visnovki, kad būtų pakeista visa integralo lanka, tobto dalis. PWM. Idealiame reguliatoriuje PWM yra kaltas dėl pakeitimo į 1. Strum, taigi, įtampa "šokinėja" per ne itin tikslią ADC atranką esant mažoms vertėms. Iš esmės koeficientas (0,1) yra mūsų galia. Bet geriau dirbti tarp roboto plienų ir reguliatoriaus ir nustatyti jį rezerve.
Integralinį koeficientą nustatydami lygų 1 ir darydami taip.

Įtampa atstatoma iki nustatyto lygio maždaug per 1 s, o reguliatorius toliau veikia stabiliai.
Dabar koeficientas yra 10.

Pratsyuє sche shvidshe, ale ShІM pradėjęs "šokinėti" 2-5 vienetams. Reguliatorius nėra stabilus. Tokio koeficiento laimėti neįmanoma.
Grynai demonstraciniais tikslais įdėjau koeficientą, lygų 20.

Vagannya pasiekė 30 vienetų SHIM. Oscilogramos ašis yra išėjimo įtampa. Viskas nukrypo nuo bėgių.

Koeficientą pasirinkite patys. Manau, kad ne Vinas kaltas, kad pakeitė 0,5. Vis dar nustatau teisingą koeficientą 0,05.

Reguliatorius nustatys iš anksto nustatytą 5 W intensyvumą 30 s. Kad būtų daugiau sandarumo, geriau padaryti daugiau. Ale Tim geriau tinka Peltier elementui. Tą koeficientą galima keisti.
Santrauka
„Smart House“ sistemai pagrindinė užduotis yra valdyti skrydžio priedus su pagalbiniu įrenginiu, pavyzdžiui, Arduino tipo mikrovaldikliu arba Raspberry PI tipo mikrokompiuteriu ar kt. Bet jei nieko nematote, išsiaiškinkime, kaip valdyti 220 V įtampą naudojant „Arduino“.
Norint valdyti keičiamo strypo lancetus, mikrovaldiklio naudojimo nepakanka dėl dviejų priežasčių:
1. Išeinant mikrovaldiklis susidaro pastovios įtampos signalas.
2. Perbraukite per mikrovaldiklio kaištį, įjunkite 20-40 mA garsą.
Galime turėti dvi perjungimo parinktis papildomai relei arba papildomam simistoriui. Triakas gali būti pakeistas dviem tiristoriais, sujungtais nuosekliai lygiagrečiai (tai yra vidinė triako struktūra). Pažvelkime į ataskaitą.
220 V įtampos valdymas pagalbiniam triakui ir mikrovaldikliui
Vidinė triako struktūra parodyta paveikslėlyje žemiau.

Tiristorius veikia tokia tvarka: jei į tiristorių įvedama įtampa tiesioginėje grandinėje (plius anodui, o minus katodui), srautas nepraeis per naują, kol duosite elektrinį impulsą. valdomas elektrodas.
Neteisingai parašiau impulsą. Tranzistoriaus viduje naudojamas tiristorius su laidininko raktu. Tse reiškia, kad struminio signalo spyruoklis per tiristorių turėtų toliau tekėti, tobto. Vіn būti atimta vіdkritim. Kad vynai susiraitytų, reikia nutraukti stūmoklį ties lancetu arba pakeisti įjungtos įtampos poliškumą.
Tse reiškia, kad kai ant elektrodo yra teigiamas impulsas, kuris yra valdomas, tiristorius, esantis gyvatės srove, praeis tik teigiamai. Triac gali praleisti strum tiek tiesiogiai, bet todėl Vіn sudaro du tiristoriai, vienas sujungtas su vienu.
Keruyuchi impulsai pagal poliškumą odos ir vidinių tiristorių gedimams, atsižvelgiant į vidinio strypo poliškumą. Tiesą sakant, tokią schemą įgyvendina išplėstas.

Kaip jau sakiau, mikrovaldiklis mato tik vieno poliškumo signalą, tam, kad signalas patiktų, reikia perjungti optizistoriaus impulsų tvarkyklę.

Tokiu būdu signalas įjungia optrono vidinę šviesą, jis įjungia triacą, kuris siunčia signalą į galios triaką T1. Kaip optodriver galite naudoti MOC3063 ir panašius, pavyzdžiui, toliau esančioje nuotraukoje parodytas MOC3041.

Nulinio kirtimo grandinė – fazės kirtimo detektoriaus lancetas. Reikalingas įvairiems panašiems mikrovaldiklių reguliatoriams įdiegti.
Kaip ir grandinė be optodriver, eksploatacijos nutraukimas organizuojamas per antrąją vietą, tačiau apatinėje, žiūrint iš priekio, galvaninio atjungimo nėra. Tai reiškia, kad pirmojo kirpimo metu įtampa gali būti pertraukta ir ant mikrovaldiklio gali atsirasti aukšta įtampa, tačiau tai yra blogai.

Įjungus / išjungus, kaltas slėgio šuoliai, ypač indukcinio pobūdžio, variklių ir elektromagnetų tipai, įtampos šuoliai, o lygiagrečiai su visais šildymo prietaisais reikia sumontuoti RC strypą.

Relė ir Arduino
Norint valdyti relę su Arduino, reikia naudoti papildomą tranzistorių srautui sustiprinti.

Pagarba, vikoristany bipolinis tranzistorius atvirkštinio laidumo (NPN-struktūra), bet taip pat galite naudoti KT315 (įprastos meilės ir visų rūšių). Diodas reikalingas EPC savaiminės indukcijos purslams slopinti induktyvumu, tai būtina, kad tranzistorius nesijaudintų esant aukštai įtampai. Kodėl kaltinate, paaiškinkite komutacijos dėsnį: "Strum induktyvumu negali pakeisti mittevo".
O kai tranzistorius yra uždarytas (atkuriant kritinį impulsą), relės ritėje susikaupusio magnetinio lauko energija turi eiti ten, kur reikia, ir įrengiamas sukamasis diodas. Dar kartą nurodysiu, kad diodas yra tiesiogiai prijungtas prie Zvorotny, tobto. katodas prie pliuso, anodas prie minuso.
Tokią schemą galite pasirinkti savo rankomis, kuri yra daug pigesnė, be to, galite įveikti draudimą už nuolatinę apkrovą.
Arba nusipirkite paruoštą modulį arba ciliarinį skydą su rele, skirtą Arduino:

Nuotraukoje pavaizduotas autonominis skydas, prieš kalbą, nauja versija, skirta KT315G stiebo stiprinimui, o žemiau matote tą patį gamyklinį skydą:


Visnovok
Saugus voverės striuko interesų valdymas gali atsidurti ant mūsų slenksčio Visa aukščiau aprašyta informacija galioja bet kuriam mikrovaldikliui, o ne tik mokėti Arduino.
„Golovne zavdannya“ - užtikrinti, kad įtampa ir srautas būtų valdomas triacui arba relei, ir galvaninis valdymo ir zminny srauto galios strypų atjungimas.
Krymas yra saugus mikrovaldikliui, tokiu būdu jūs apsidraudžiate, kad techninės priežiūros metu nepašalinsite elektros traumų. Dirbant su aukšta įtampa, būtina apkarpyti visas saugos technologijų taisykles, apkarpyti PUE ir PTEEP.
Galima cituoti schemos Qi. Simistori ir relės kartais veikia kaip tarpinis signalinis signalas. Ant kietų perjungimo jungiamųjų detalių didelė srovė valdo ritę ir yra be vidurio, kai yra sandarus kontaktorius arba starteris.
Oleksijus Bartošas
Arduino pagrindu sukurtas reguliatorius yra vienas iš šimtų paprastų ir paprastų priedų, kurių pagalba galite sklandžiai pakeisti laido įtampą nuo 0 iki nominalios vertės. Kozhen koristuvach Arduino žino zastosuvannya tokį pasitikėjimą savimi, o dosvid, atimdamas pasirinkimo valandą savo rankomis, papildo žinių bagažą.
Schema ir principas її roboti
Kaip ir patys nebrangiausi reguliatoriai, taip pat pateikta fazinės įtampos reguliavimo darbo schema, kurią galima pasiekti primus primus maitinimo jungiklio - simistoriaus - keliu. Principas dії schemos є ateiti. Arduino programinės įrangos lygmeniu formuoja impulsus, kurių dažnį valdo opir potenciometras. Elektrinis impulsas iš P1 praeina per optroną MOC3021 ir patenka į triac elektrinį elektrodą. Vіn v_dkrivaєtsya ir praeina strypus iki įtampos perėjimo per nulį, po kurio jis užsidaro. Tada prasideda impulsas ir ciklas kartojamas. Zavdyaki valdymo impulsų sunaikinimas, išnykimo taške dalis sinusoidės nupjaunama išilgai priekio.
Kad triakas kreivėtų iki nurodyto algoritmo, impulsų dažnis turi būti sinchronizuotas su 220 V įtampa. Kuriems reguliatoriuose ant elementų R3, R4 ir PC814 yra sumontuoti atbulinės jungties lęšiai, kurių signalą, kurį reikia matyti P2, analizuoja mikrovaldiklis. Nulinio detektoriaus lancete yra 10 kOhm rezistorius R5, kuris reikalingas optrono išėjimo tranzistoriaus priežiūrai.
Viena simistoriaus maitinimo grandinė yra prijungta prie fazinio signalo, o įtampa prijungta prie kitos. Nulinis laidas 220 be vidurinio ID nuo gnybto J1 iki J2, o tada į priekį. „Zastosuvannya“ optronas yra būtinas reguliatoriaus grandinės galios ir žemos įtampos dalių galvaniniam atjungimui. Potenciometras (schemoje nenurodytas) yra prijungtas prie viduriniojo prie bet kurio Arduino analoginio įėjimo, o du kraštutiniai yra prijungti prie +5 ir "aukšto". 
Drukovana lenta ir saugojimo detalės
Minimalus radijo elementų skaičius leidžia suprojektuoti vienpusę lentą, kurios dydis neviršija 20x35 mm. Kaip matote iš mažylio trečios dienos keitimo rezistoriaus, radioamatorius gali savarankiškai paimti dvigubo formos koeficiento potenciometrą ir nurodyti jo tvirtinimo vietą prie gatavo reguliatoriaus korpuso. Ryšys su Arduino jungiamas laidais, kurie yra lituojami prie atvirų durų plokštėje.
Norėdami savo rankomis pasirinkti reguliatorių, kerovanny Arduino, jums reikia šių radijo elementų ir detalių:
- Triac BT136-600D, pastato įtampos valdymas iki 600 V ir praeina per srovės srovę iki 4 A (natūralu, su priekiniu montavimu ant radiatoriaus). Prie schemos galima statyti triak ir su didesniu dominančiu pastatu. Golovne - užtikrinti šilumos patekimą į kūną ir teisingai uždėti strypus ant elektros elektrodo (apdailos parametras). Jungiant prie didelio įtempimo elektros prietaiso navantazhennya, reikės iš naujo pateikti kitų grandinės maitinimo dalies laidininkų plotį. Kaip pasirinktis, galios takelius galima dubliuoti iš kitos mokėjimo pusės.
- Optronas MOC3021 su triac išėjimu.
- Optronas PC814 su tranzistoriaus išėjimu.
- Rezistoriai, kurių vardinė vertė yra 1 kOhm, 220 omų, 10 kOhm, kurių intensyvumas 0,25 W ir 2 rezistoriai su 51 kOhm, kurių intensyvumas yra 0,5 W.
- Pakaitinis rezistorius 10 kΩ.
- Gnybtų blokeliai - 2 vnt., su dviem rožėmis ir 5 mm nėrimu.
Visus projektui reikalingus failus galite rasti ZIP archyve: dimmer-arduino.zip
Arduino kietėjimo algoritmas
Simistorių priežiūros programa buvo sukurta Timer1 laikmačio ir Cyber.Lib bibliotekos pagrindu, todėl į robotą buvo įvesti kiti programų kodai. Principas її dії є eisime į priekį. Kai įtampa pereina per nulį „iš apačios į viršų“, laikmatis iš naujo nustatomas į „iš viršaus į apačią“ ir paleidžiamas tinkamu laiku iki „Dimmer“ keitimo vertės. Tuo momentu, kai įsijungia Arduino laikmatis, susidaro impulsas, kuris yra valdomas, įsijungia triacas. Įžeidžiančio perėjimo per nulį atveju triac nustoja praleisti srautą ir tikrina juodraščio laikmatį. І taigi 50 kartų per sekundę. Triac įvesties trukdžių reguliavimui keičiamas reguliatorius. Jis nuskaito ir apdoroja potenciometro signalą ir gali gauti reikšmę nuo 0 iki 255.
Tamsesnė sritis „Arduino“.
Akivaizdu, kad naudojant brangų Arduino halogeninių lempų ryškumui valdyti yra piktina. Kam įprastą vimikachą geriau pakeisti pramoniniam paruošimui skirtu reguliatoriumi. Pritemdykite Arduino
- keruvati be-yakim aktyviosios navantazhennia rūšys (lituoklio šildymo temperatūra, tekančio vandens šildytuvas ir kt.) tiksliai sureguliuojant nurodytą parametrą;
- per naktį vikonuvat kіlka funktsіy. Pavyzdžiui, norint užtikrinti, kad vranci įjungimas būtų sklandus (įskaitant vakarus), būtų lengvas, taip pat kontroliuoti terariumo temperatūrą ir vandens kiekį.
Kažkaip tam tikra tvarka įtampa kinta įtampoje, galima pasitelkti osciloskopo pagalbą. Tam prie išorinių reguliatoriaus gnybtų prilituojamas varžinis dilnikas, nes signalą valdymo taške reikia keisti apie 20 kartų. Po to, prieš ateinant laikui, ateina osciloskopo zondai ir maitina grandinę. Keičiant potenciometro rankenėlės padėtį, osciloskopo ekrane, galite sklandžiai stebėti Arduino lygius su triac ir chi bei aukšto dažnio poslinkiais.
Taip pat skaitykite
Šia pamoka pradedu straipsnių seriją, skirtą impulsų stabilizatoriams, skaitmeniniams reguliatoriams ir išorinio slėgio reguliavimui.
Meta, kaip aš sakiau, yra šaldytuvo valdiklio paskirstymas ant Peltier elemento.
Mano kūrimo robotinis analogas, tik diegimai Arduino plokštės pagrindu.
- Tsya rozrobka bagatioh zatsіkavila, o man sipalis lapai su prohannyam parduoti її Arduino.
- Kūrimas idealiai tinka skaitmeninių valdiklių aparatinės ir programinės įrangos dalių kūrimui. Iki tol atliksite savo beasmenę užduotį, išmoktą iš ankstesnių pamokų:
- vimiryuvannya analoginiai signalai;
- darbas su mygtukais;
- indikacinių sistemų prijungimas;
- temperatūros kontrolė;
- robotas iš EEPROM;
- zv'yazok іz kompiuteris;
- lygiagrečiai procesai;
- ir daug daugiau.
Seku raidą nuosekliai, po truputį, aiškindamas savo veiksmus. Nežinau, koks to rezultatas. Dirbu su nauju šaldytuvo valdiklio darbiniu projektu.
Man nepatinka baigtas projektas. Pamokas rašau tiksliai stovykloje, už tai galiu pabandyti valandą, galiu pasakyti, kad kažkada pasigailėjau. pataisau. Geriau, žemiau, aš išsiaiškinsiu detales ir paruošiu sprendimą.
Vіdmіnіst rozrobki vіd prototipas.
Vienintelė PIC valdiklio išplėtimo prototipo funkcinė galia yra rankinio įtampos stabilizatoriaus naudojimas, kuris kompensuoja gyvavimo įtampos pulsavimą.
Tobto. Šis priedo variantas kaltas dėl to, kad gyvena stabilizuotame džerelyje su žemu pulsacijos lygiu (ne daugiau kaip 5%). Tsim vimogam vіdpovidіdat uѕі moderni impulsі gyvenimo blokai.
Ir nestabilizuoto maitinimo bloko (transformatoriaus, tiesintuvo, ortakio filtro) tiesioginis pasirinkimas yra išjungtas. Arduino sistemos SWIDCODE neleidžia įdiegti SWID įtampos reguliatoriaus. Rekomenduoju perskaityti instrukcijas prieš Peltier elementui gyvuojant.
Sutvarkysiu zagalny struktūros suskaidymą.
Kuriame etape liūdnai pagarsėjusiam ieškotojui reikia suprasti:
- Iš šių elementų sukuriama sistema;
- ant kurio valdiklio її vikonati;
- chi pakankamai visnovkіv ir funkcinės valdiklio galimybės.
Atstovauju valdiklį su "juodu ekranu" arba "smіtєvoyu duobe" ir prijungiu prie jo viską, ko reikia. Tada stebiuosi, kas tinka meti, pavyzdžiui, Arduino UNO R3 plokštė.
Mano interpretacija tokia.

Nupiešiau tiesią liniją - valdiklį ir visus signalus, reikalingus sistemos elementų prijungimui.
Prieš mokėdamas patikrinau, ką reikia prisijungti:
- LCD indikatorius (rezultatams ir režimams rodyti);
- 3 mygtukai (vaškavimui);
- šviesos atleidimo indikatorius;
- ventiliatoriaus jungiklio mygtukas (skirtas karštam šoniniam radiatoriaus ventiliatoriui įjungti);
- impulsinio stabilizatoriaus raktas (Peltjė elemento sandarumui reguliuoti);
- analoginė įvestis, imituojanti pažangos srautą;
- analoginis įėjimas į apkrovos įtampą;
- temperatūros jutiklis prie fotoaparato (tikslus 1 laido jutiklis DS18B20);
- radiatoriaus temperatūros jutiklis
- signalizuoti nuorodą iš kompiuterio.
Usyi gavo 18 signalų. Arduino UNO R3 plokštė ir Arduino NANO turi 20 lizdų. Dar dvi visnovkos buvo paliktos atsargoje. Gal norite pajungti dar vieną mygtuką, ar šviesos diodą, ar drėgmės jutiklį, ar šaltos pusės ventiliatorių... Mums reikia 2 ar 3 analoginių įėjimų, plokštėje yra 6. Tobto. visi mes esame suverenūs.
Galite nurodyti visnovkіv vіdrazu skaičių, galite pasakyti rozrobki valandą. Pripažinau Odrazu. Ryšys užmezgamas per roznimannya, galite jį pakeisti. Mayte jūsų sąskaitoje, kad visnovkivi pripažinimas yra likutinis.
Impulsų stabilizatoriai.
Norint tiksliai stabilizuoti temperatūrą ir Peltier elemento veikimą, būtina optimaliu režimu reguliuoti naujojo slėgį. Reguliatoriai yra analoginiai (linijiniai) ir impulsiniai (raktas).
Analoginiai reguliatoriai nuosekliai prijungiami prie maitinimo šaltinio, reguliavimo elemento ir įtampos. Kad būtų lengviau pakeisti reguliavimo elemento atramą, reikia sureguliuoti įtampą prie strumos ant įtempimo. Kaip reguliavimo elementas, kaip taisyklė, naudojamas bipolinis tranzistorius.

Reguliavimo elementas naudojamas tiesiniu režimu. Ant naujojo matosi "zayva" sandarumas. Dėl didelių strypų šio tipo stabilizatoriai labai įkaista, todėl susidaro mažas CCD. Tipiškas linijinės įtampos stabilizatorius yra 7805 mikroschema.
Mums šis variantas nepatinka. Robotų impulsų (raktų) stabilizatorius.
Impulsų stabilizatoriai yra skirtingi. Mums reikia nuleidžiamo impulso reguliatoriaus. Tokių ūkinių pastatų įtampa yra mažesnė nei įtampos įtampa. Žemyninio perjungimo reguliatoriaus grandinė gali atrodyti taip.

І tse roboto reguliatoriaus diagrama.

Tranzistorius VT veikia rakto režimu, taigi. naujas gali turėti daugiau nei du stovus: atvirą arba uždarą. Pritvirtintas valdiklis, tuo pačiu ir mikrovaldiklis, perjungia tranzistorių dainavimo dažniu ir tausojančiu.
- Jei tranzistorius prapučia per lancetą: gyvenimą keičiantis, VT tranzistoriaus jungiklis, L droselis, įtampa.
- Atidarius raktą, droselyje sukaupta energija yra prie mentės. Strūkio srautas išilgai strypo: droselis, VD diodas, navantazhennya.
Tokiu būdu pastovi įtampa reguliatoriaus išėjime turėtų būti atidaryto klavišo (topen) ir uždarymo (tclose) metu. vіd sparuvatostі іpulsіv adminіnnya. Pakeitus atsarginę dalį, mikrovaldiklis gali pakeisti įtempimo įtampą. Kondensatorius C išlygina išėjimo įtampos pulsaciją.
Pagrindinis šio reguliavimo būdo privalumas – aukštas KKD. Tranzistorius visada turi būti žinomas uždaram kvartalui. Todėl spaudimas naujajam yra mažas - arba tranzistorių įtampa yra artima nuliui, arba srautas yra 0.
Tai tradicinė impulsų mažinimo reguliatoriaus schema. Jame yra pagrindinis tranzistorius, kuris buvo atskirtas nuo kietos šerdies. Svarbu valdyti tranzistorių, prie įtampos šynos reikia naudoti specialius lantelius.
Todėl pakeičiau schemą. Tuo nіy nіy vіdіrvanо vіdіrvano vіd zagalny drotu, tada prie zagalny drotu pririšant raktą. Toks sprendimas leidžia naudojant tranzistoriaus raktą įjungti mikrovaldiklio signalą, vikoristovuyuchi paprastą vairuotojo-pidsiluvach struma. 
- Kai raktas uždarytas, stulpelis yra prie lansyug įėjimo: zherelo zhivlennya, droselis L, klavišas VT (raudonos spalvos indikacijų stulpelio kelias).
- Kai raktas atidarytas, droselyje sukaupta energija paverčiama galia per regeneracinį diodą VD (kelias į mėlynos spalvos indikacijų srautą).
Praktinis pagrindinio reguliatoriaus įgyvendinimas.
Turime įdiegti aukštos įtampos valdiklį su šiomis funkcijomis:
- Vlasne rakto reguliatorius (raktas, droselis, regeneracinis diodas, kondensatorius, išlyginimas);
- lansyug vimіru naprugi on navantazhennі;
- lansyug vimiryuvannya struma reguliatorius;
- apparatny zahist vіd revischennya strumu
Aš praktiškai be pakeitimų paėmiau reguliatoriaus grandinę.
Impulsų reguliatoriaus robotams su Arduino plokšte schema.

Kaip maitinimo jungiklį pasirinkau MOSFET tranzistorius IRF7313. Straipsnyje apie Peltier elemento valdiklio intensyvumo padidėjimą, kaip pranešama, rašiau apie q tranzistorius, apie galimybę jį pakeisti naudojant pagrindinius grandinės tranzistorius. Siuntimo techninei dokumentacijai ašis.
Tranzistorių VT1 ir VT2 atveju pasirenkama pagrindinio MOSFET tranzistoriaus tvarkyklė. Tai tik srauto stiprintuvas, vėjo įtampai jis susilpnina signalą iki maždaug 4,3 V. Todėl raktinis tranzistorius gali būti žemo slenksčio. Іsnuyut skirtingos MOSFET tranzistorių tvarkyklių įgyvendinimo galimybės. Be to, yra keletas integruotų tvarkyklių. Ši parinktis yra pati paprasčiausia ir rasta.
Norėdami vimiryuvannya napruzha ant navantazhenni vykoristatsya dilnik R1, R2. Esant tokioms rezistorių varžų vertėms ir 1,1 V atraminei įtampai, perjungimo diapazonas tampa 0 ... 17,2 V. Įtempimo įtampa apskaičiuojama, žinant gyvenimo įtampą:
Unavantage = U valgymas – Uvimiriečiai.
Buvo suprasta, kad vimiro tikslumas yra pasenęs, atsižvelgiant į įtampos atramos stabilumą, gyvenimas buvo gyvenimas. Bet mums nereikia didelio tikslumo įtempimo, strumos, įtempimo sandarumo atžvilgiu. Turime tiksliai kontroliuoti ir sumažinti temperatūrą. Її mi ir vimіryuvatememo su dideliu tikslumu. Ir jei sistema parodys, kad Peltier elemento intensyvumas yra 10 W, bet realiai jis bus 10,5 W, tai ant roboto jis neatsiras. Būtina išspręsti visus energetinius parametrus.
Strum vimiryuetsya už papildomą rezistorių-jutiklį Strum R8. Komponentai R6 ir C2 sudaro paprastą žemųjų dažnių filtrą.
Elementuose R7 ir VT3 buvo pasirinkta paprasčiausia aparatinės įrangos apsauga. Kai tik strypas ties lancetu perjungiamas virš 12 A, tada rezistoriuje R8 įtampa pasiekia tranzistoriaus 0,6 V slenkstį. Viskas gali įsijungti. Gaila, kad tokio perėjimo slenkstis priklauso nuo dvipolio tranzistoriaus tamprios bazės-emiterio (0,6). Per tse zahist spratsovuє tik reikšmingiems strams. Galite pakoreguoti analoginį lyginamąjį įrenginį arba išlyginti grandinę.
Stumtelėjimas bus tikslesnis su didesne R8 strypo jutiklio atrama. Ale, aš jį pamačiau į naują reikšmingą sandarumą. „Navit“ su 0,05 omo atrama ir 5 A srove ant rezistoriaus R8 pakilo 5 * 5 * 0,05 \u003d 1,25 W. Atkreipkite dėmesį, kad rezistoriaus R8 maksimali galia yra 2 vatai.
Dabar, koks strum mi vіryuєmo. Mes vimiryuemo Strum spozhivannya іpulso stabilizatorius vіd dzherel zhivlennya. Parametrų dispersijos schema yra daug paprastesnė, apatinė strumu navantazhennya dispersijos schema. Navantazhennya turime "vіdv'yazane" vіd zagalnogo drotu. p align="justify"> Robotinei sistemai būtina pakoreguoti Peltier elemento elektrinį slėgį. Reguliatoriaus slėgį galime apskaičiuoti gyvavimo slėgio įtampą padauginę iš lėtėjančio strypo. Atkreipkite dėmesį, kad mūsų reguliatorius turi 100% CCD ir akivaizdu, kad Peltier elementas yra spaudžiamas. Tikrasis reguliatoriaus KKD bus 90-95%, tačiau klaida robotinėje sistemoje nepasirodys.
Komponentai L2, L3, C5 yra paprastas radijo kodo filtras. Gali būti, kad niekam nėra ko vartoti.
Rozrahunok droselio klavišo stabilizatorius.
Droselis gali turėti du mums svarbius parametrus:
- induktyvumas;
- strim neklaužada.
Reikiamą induktoriaus induktyvumą lemia PWM dažnis ir leistini induktoriaus srauto raibuliukai. Yra daug informacijos šia tema. Atnešiu paprasčiausią rozrahunoką.
Per naują gruntą pridėjome įtampą droseliui ir striukui, stulpelis išsipūtė. Zbіshuvatsya, bet ne 'pasirodo, nes įjungimo I įjungimo momentu stribas jau praėjo per droselį).

Tranzistorius pasikeitė. Prie droselio buvo prijungta įtampa:
Uthrottle \u003d U maistas – U maistas.
Peršok per droselį, pasodinęs augalus už įstatymo ribų:
Ichoke = Uchoke * tv_dkr / L
- tvіdkr - trivalumas atviro rakto impulsui;
- L - induktyvumas.
Tobto. droselio svirties pulsavimo reikšmę arba padidėjusį stulpelių skaičių per valandą įvedus klavišą parodo virusas:
Ivikl - jonas \u003d Uchoke * tv_dkr / L
Įtampa gali pasikeisti. Ir tai rodo droselio įtampą. Іsnuyut formulės, mokyklų mainai vrakhovuyt tse. Ale, mūsų mąstyme aš įgavau šias reikšmes:
- gyvavimo įtampa 12;
- minimali Peltier elemento 5 įtampa;
- taip pat maksimali droselio įtampa yra 12–5 \u003d 7 šaukštai.
Atviro klavišo tvdcr impulso trivališkumą lemia PWM periodo dažnis. Chim ten, laikas mažesnis induktyvumas reikalingas droselis. Maksimalus Arduino plokštės PWM dažnis yra 62,5 kHz. Kaip atimti tokį dažnį, aš rozpovіm ateinančiame amžiuje. Її і vicoristovuvatimemo.
Pasirinkite geriausią variantą – PWM persijungia tolygiai laikotarpio viduryje.
- Trivalumo periodas 1/62500 Hz = 0,000016 sek = 16 µs;
- Atviro rakto trivališkumas = 8 µs.
Strumos pulsacijos tokiose schemose gali būti nustatomos iki 20% vidutinės strumos. Nereikia klaidžioti dėl išėjimo įtampos bangavimo. Їх išlygina kondensatorius grandinės išėjime.
Pavyzdžiui, leidžiame 5 A stulpelį, imame 10% arba 0,5 A stulpelio pulsavimą.
L \u003d U droselis * tv_dkr / Ipulsacija \u003d 7 * 8 / 0,5 \u003d 112 μH.
Droselio svirtis.
Viskas pasaulyje yra tarp. І droselis tezh. Esant tam tikram venų ruožui, jis nustoja būti indukcinis. Tse i є droselio svirtis.
Kartais didžiausias droselio svirtis rodomas kaip vidutinis stulpelis ir pulsacijos, tobto. 5,5 А. Lyg norėtume, kad galėtume dirbti su šio schemos varianto technine apsauga, gedimas buvo ne mažesnis nei 12 A.
Juostelę žymi tarpelis ties droselio sklendės magnetine šerdimi. Straipsniuose apie Peltier elemento valdiklius kalbėjau apie droselio konstrukciją. Kai tik pradėsiu kalbėti šia tema reportaže, tada rašysime apie Arduino, pavyzdžiui, programavimą, ir nežinau, ar apsisuksime.
Mano droselis atrodo taip.

Akivaizdu, kad pjovimui gali pakakti induktoriaus apvijos. Rozrahunok yra paprastas - šiluminių nuostolių žymėjimas su papildoma aktyvia apvijos atrama.
Aktyvus apvijų palaikymas:
Ra \u003d ρ * l / S,
- Ra – aktyvi apvijų atrama;
- Ρ – atrama medžiagai, midi 0,0175 Ohm mm2/m;
- l - apvijos ilgis;
- S - tinklainės drotu apvija.
Šilumos sąnaudos, kai palaikomas aktyvus droselio sklendė:
Pagrindinis reguliatorius palaiko tinkamą srautą ir negali leisti jam praeiti per Arduino plokštę. Diagrama rodo, kad laidai iš gyvybės bloko yra prijungti be vidurio prie blokuojančių kondensatorių C6 ir C7.
Pagrindiniai grandinės srovės impulsai praeina už grandinės C6, stiprinimas, L1, D2, R8. Tsey lansyug gali zakatisya zv'azyazki z minimal dozhinoy.
Pagrindinis Arduino magistralės laidas yra prijungtas prie blokuojančio kondensatoriaus C6.
Vykdykite signalus tarp Arduino plokštės ir rakto stabilizatoriaus modulio, kad įkrovimas būtų minimalus. Kondensatoriai C1 ir C2 labiau tikėtina, kad bus roztashuvat ant rožių, prijungtų prie lentos.
Lentoje pasirinkau schemą. Sulitavus mažiau reikalingus komponentus. Man schema atrodo taip.


Nustačiau PWM į 50% ir dar kartą patikrinau roboto grandinę.
- Gyvenant kompiuteriu, atlyginimas buvo formuojamas už PWM užduotis.
- Su autonominiu gyvenimu senajame gyvenamajame name viskas stebuklingai veikė. Impulsai buvo formuojami ant droselio su gerais priekiais, prie išėjimo buvo nuolatinė įtampa.
- Jei tuo pačiu metu įjungiau tiesioginį maitinimą ir kompiuterį bei maitinimo bloką, mano Arduino plokštė užsidegė.
Mano blogas atleidimas. Rozpovіm, schob її nіhto nekartojant. Vzagali, jungiantis bejausmį gyvenimo bloką, reikia būti atsargiems, skambinti visais skambučiais.
Man gavosi taip. VD2 diodo schemoje. Pridėjau jogos įrašą, kuris yra nepriimtinas. Aš vvazhav, scho mokėjimas gali gyventi tame pačiame dzherel per Vin. Aš pats rašiau 2 pamokoje, kad lenta gali atimti gyvybę iš skambinančiojo dzherelio per rožę (signalas RWRIN). Bet aš maniau, kad tai tas pats signalas, tik ant skirtingų rožių.
Į kompiuterio USB lizdus įkišau gyvybės bloką (neįjungdamas prie krašto) ir Arduino plokštės laidą. Stabilizatoriaus plokštės U1 NCP1117 išvestyje į USB lizdą buvo įjungta +5 V įtampa. Schema įeina
Pažiūrėkime į vieną cikavos ir korisnės maistą. Dimmer, skirtas reguliuoti pakaitinio srauto įtampą arduino pagalba. Tobto, sklandus tokių nėrinių jungiamųjų detalių valdymas, kaip lempos, kaitinimas matant šešėlius ar šiltą orą.
Kіlka tizhnіv tіzhnіv іn kituose kanаlі, yіvіvnіstyu іnіstіvnіstu arduino progruvanniu, vіyshov vidos vіdos іnіnіv shsignal-a іnіnіna іnіnіnіnіnіnіna vantagenarymаstоnіnіna vantagenarymаstоnіnіna vantagenіvnіstyu іnіstіvnіstu arduino progruvanniu. Tie, kurie stebisi iš karto, neužtenka būti tame kanale. Ale virishiv publikuoti jogą.
Radijo komponentai, komponentai ir jungiamosios detalės bet kurioje Kinijos parduotuvėje.
Prie rozetės kintamasis strypus yra sinusinis, todėl įtampa per valandą kinta tolygiai, o oda 10 milisekundžių iki nulio. Stebėdami vaizdo įrašą apie PWM signalą suprasite, kad negalite suklysti ir pradėsite reguliuoti sinusoidę.
Priedas, kuris yra robotas, vadinamas reguliatoriumi. Prie naujojo į lizdą patenka sinusinė sinusinė banga ir ji nupjaunama. Dimmer nepraleidžia dalies sinusoido. Kuo didesnė dalis, tuo mažesnė vidutinė įtampa. Keičiant tarpus, jei įtampa pasiekia nulį, reguliuojame bendrą įtampą. Vidkrivaє kad zakrivaє naprugu toks sviesus, kaip triac. Smarvė sklido skirtinguose pastatuose ir skirtinguose stulpuose. Pavyzdžiui, puikus vaikinas gali praleisti per save 40 amperų esant 800 voltų įtampai. Kas yra arti 30 kW.
Norint naudoti triacą akimirką ir valandą, jums reikia rožių pakuotės. K_lka rezistoriai ir du optronai. Viską galite nusipirkti už centą bet kurioje radijo komponentų parduotuvėje arba per radijo ryšį. Norėdami aiškaus ryšio, galite paimti klijus. Ir jūs galite pasirinkti visą schemą duonos lentoje. Ryšio schema atrodo kaip įžeidžiantis rangas.
Triac išplečia laidą 220v, arduino yoga v_dkrivatime ir kreivę per optroną. Taigi pats arduino mūsų saugumui bus optiškai sujungtas su tinklelio įtempimu. Man svarbus momentas. Kad įjungtų simistorių, arduino kaltas kilnumu, jei įtampa eina per 0. Tam yra optronas, kuris yra prijungtas prie priešingo banko. І prie išėjimo iš jo imamas signalas, jei įtampa linijoje eina per 0. І tai atlieka triakas per viršutinį optroną. Roboto troch algoritmas pagal metus.
Paimame schemą prie vartų
Idealiu atveju tokią kalbą reikia dirbti ant kitokio audinio. Kalbant apie kanalus, tai nėra didelis dalykas vaizdo pamokų ciklui. Parodyta, kaip veisti ir mokėti, kad kaip nuodyti. Na, iki tol jūs negalite sunkiai dirbti, kad sumokėtumėte, ir dar du keliai. Pirma, duonos lentoje pasirinkite grandinę. Ką darysime dėl whilinos. І draugas - paprašykite lentų paruošimo iš kinų. Zrobiv kіlka parinktys lentoms Easyeda platformoje. Perša - mažoje septintoje istorijoje, draugas - didžiojoje septintoje istorijoje. 1-asis trečdalis, ce trikanalio dimeras. Kuris turi vieną dvigubą įėjimą ir vieną gilų nulio detektoriaus išėjimą. Trys išėjimai navantage ir 3 kontaktai trioma by arduino triacs. Schemą lengva pakeisti ir išplėsti dimerį bet kokiam kanalų skaičiui.
Norėdami gauti atlyginimą, turite iš projekto išgauti gerber failus. Paspaudžiame mygtuką ir tempiame į lentų šoną easyeda servise. І spustelėkite mygtuką, kad atsisiųstumėte gerber failus. Jie atsisiunčiami viename archyve. Idemo į lg psb paslaugų svetainę. Tai viena iš rastų ir didžiausių kitų plokščių paruošimo pramoniniu mastu paslaugų su pristatymu. Apie kiekvieną įvykį iš karto prisijunk. Pereikime prie dėžutės ir pridėkime naujo žavesio. І pridėkite gerber failą, tai yra tą patį archyvą. Vienkartinis mokėjimas. Mes pasirenkame vieną kamuolį. Rozmarinas, kaip ir bachitas, buvo nustatytas automatiškai. Kiekis - galite įdėti 5 vnt. Tovshchina textolіtu, spalva. Nagi raudona. Tai kaukės spalva, kurią dengia lenta. Pasirinktas lydmetalis, kuris bus atviras kelias. Tse alavo švino, be švino, taip, aš nežinau, kuris. Dali tovščina iš varinės folijos nėra tekstolitas. Na, ko nors kaina keičiasi du kartus. Eik auksiniais pirštais. Tse grebіnets įterpti lentą į rožes. Tada galite imti mokestį iš tokio ieškotojo. Vis tiek galite patikrinti likusius kontaktus. Ale nieko nereikia. Visi pasiima krepšelį. Kaip tu gali bachiti, vartist už 5 honorarus tapti 2 doleriais. Tobto, apie 25 rubliai už vieną mokestį. Sumokėkite prekybos išlaidas ir išsiverkite praktiškai už nieką.
Vienintelis dalykas yra pristatymas. Pateikite savo adresą. Aiškumo dėlei paskambinkite transliteracijos tarnybai, kuri verčia rusiškas raides iš transliteracijos. Tas pats pristatymas. 30 dolerių už kurjerį, o standartinis - 250 rublių už paštą. Dhl, nepraktikuokite su fiziniais asmenimis. Jei nežinote jokių firmų, tai geriau nesikreipkite ir nusipirkite porą tižnivų tvarkingai. Mokėti galite tiesiog paypal arba banko kortele. Zagalom, drukovani moka zamovit ir kol smarvė eina, paimame schemą ant maketo.
Šis keičiamo srauto reguliatoriaus lankstymo projektas iškeliamas į dienos šviesą, nes galite pasiimti ant duonos lentos, stebėdamiesi kitos plokštės tobulėjimu. Štai kodėl komponentai įdedami į duonos lentą taip pat, kaip ir spausdintame puslapyje. І z'єєdnuєmo su pačių komponentų kojomis. Ašis, pavyzdžiui, triac pasiekia ir gnybtus, ir optronus. Imame ir lituojame. Taip pat galite laimėti gyvybę iš vaizdo įrašo apie baterijų alaus daryklą. Norėdami paskleisti skyrybas, priklijuokite ją ant duonos lentos ir lituokite, sutelkdami dėmesį į takelius. І po 10 skaidulų lenta išeis su pincetu ir lituokliu. Kompaktiška.
Dėl z'ednannya yra daug komponentų. Vienam reikėjo laukines sūpynes su vario smiginio gabalėliu. Svarbus momentas. Lituotas glicerino srautu, ir jūs galite tai sekti. Laimėk spindesį. Dimmer turi būti naudojamas esant 220v įtampai ir prasiskverbti per srautą, ir jis nėra stabilus. Abo pradėjo degti. Paimkime dantų šepetėlį ir išvalykime. Na, zavė žirklėmis nupjauta metalui, bet kraštas lygus. Ir viskas, paruoškite dimerį. Gerai, kad jis kompaktiškas.
Maketo pavyzdyje pasirinkau variantą su puikiu vaikinu. Norėdami gauti papildomų pagalvėlių, eikite tiesiai į simistorių. Lіva - tse vhіd, vidurinis - vkhіd, o teisės - zagalna įėjimui ir išėjimui. Prieš jį, už grandinės, yra tik vienas rezistorius. Pats triakas klijuojamas ant dvipusės juostos. Idealiu atveju trinkeles reikėjo prisukti. Kad ir taip ziyde. Ūsai. Lituojama tiesiog rezistorių kojelėmis. Šis mokestis reikalingas viename iš šių projektų. Pabandykite iš komentarų atspėti, ką galite padaryti.
Iš karto susimąstėme apie algoritmą, kaip veikia triac valdymas. Taigi ašis, keruvati su triac bus su arduino. Firmware parašyta specialia programa. Yra du svarbūs punktai. Pirmasis yra pašalinti signalą iš nulinio detektoriaus išėjimo, kuris rodo, kad įtampos sinusoidas keičia 0 voltų įtampą. Išjunkite nulinių jungčių detektorių, kad išjungtumėte įrenginį. Tse kitas pin arduino. І kaištis ištrauktas į žemę su 10 kilogramų rezistoriumi. Vidinis suveržimas neveikia. Mes nežinome kodėl. Atsižvelgiant į dabartinę programinę-aparatinę įrangą internete, algoritmas nėra sudėtingas. Štai kodėl simistorius nepriklauso nuo programos kodo sprendimo. Įdiegtas papildomam laikmačio laikmačiui-1. Oskіlki vikoristannya zvichaynyh lichnikіnі v prizvede į deyakyh mehtinnya per kozhnі kіlka khvilin.
Rankiniam darbui su laikmačiu galima naudoti Cyberlip biblioteką. Zagal, esmė tokia, kaip rodomas nulio kirtimas iš apačios, visa esmė, laikmatis paleidžia valandėlę pritemdyti, o reset atstato į įtampos kirtimą per nulį iki žvėries žemyn. I valanda pišovo. Po to, kai laikmatis buvo spratsovuvannya, „Simistor“ pradeda skambėti sulėtėjus. Kai tik atstatymas pereina nuo nulio iki žvėries žemyn, pasigirsta laikmačio garsas ir vėl nustatomas iš naujo. Ir taip pat vimikaє strims per triac. Tai kartojama 50 kartų per sekundę.
Norint reguliuoti valandą, per kurią rodomas triakas, po peretinos per nulį, potenciometras pasikeitė. Pakeiskite reguliatorius, kad priimtumėte reikšmes nuo 0 iki 255. Kaina ir minimalus ryškumas. aš visi. Spėju, kad visas schemas ir eskizą galima paimti iš projekto pusės. Paskelbta vaizdo įrašo aprašyme.
Dimmer gali būti pergalingas ne tik cheruvannya Iskravistyu. Didesnį susidomėjimą kelia šildymo elemento valdymo sistema su durų skambučiu. Tiksliam nustatytos temperatūros valdymui.
Be to, reguliatorių galima įjungti tokiose sistemose kaip išmanioji kabina ir valdyti tą reguliatorių internetu. Kam reikia rašyti programas windows, android ir web.
Atkeliavo kiniški rankdarbiai. Pakartojame, jei esate fizinis asmuo, tada geriau už tai mokėti. Per dhl turėjau galimybę apsimesti žinoma įmone ir perregistruoti dokumentus ant pirštinių. Zagalo tokie mieli ruoniai. Jakščo vrahuvati, scho smarvė kainavo 25 rublius. Atspėk ką, kinai šiek tiek mato. Priešingu atveju uždenkite.
Prilitavo vieną reguliatorių ir prijungiau jogą prie arduino, kaip ir anksčiau. Naudojant potenciometrą, lemputės įtampa keičiasi nuo maksimalios iki beveik silpnos. Tikrai cikava vaizdas.
Be jokios abejonės, visi vaizdo įraše išėję iš dimerio norėjo stebėtis tikrąja švilpuko forma. Chi vіdpovidaє iš paveikslėlių, rodydamas juos. Paspartinkite su pigiu kinišku osciloskopu, kuris gali vibruoti iki 12 voltų įtampą. Sustabdyti. Taigi jūs negalite dirbti. Norint sumažinti stresą, reikia paspartinti dalyką, kaip streso darbuotoją. Pіdіyde spіvvіdnoshennia nuo 1 iki 20. Taigi rezistoriai nebuvo kepti ant grotelių, atsižvelgiant į dviejų šimtų dešimties kilogramų nominalus. Tiksliai viskas įskaičiuota ir tik tada įtraukiama į matą. Tse yra nesaugu visam gyvenimui. Aš bachimo labai gražus, kaip nuotraukose. Matyti, kad įtampa sinusoidės periodais pasirodo, nukrenta iki nulio ir išnyksta. Shchob vėl uvіmknetsya dėl įžeidžiančio napіvperіudu laikmačio. Nuostabus reginys!