Багато електронних схемах використовуються системи активного охолодження з вентиляторами. Найчастіше їх мотори управляються мікроконтролером або іншою спеціалізованою мікросхемою, а швидкість обертання регулюється за допомогою ШІМ. Таке рішення характеризується не надто гарною плавністю роботи, може призвести до нестабільної роботи вентилятора, а також створює багато перешкод.
Для потреб високоякісної аудіотехніки розроблено аналоговий регулятор обертів вентилятора. Схема нагоді при будівництві підсилювачів НЧ з активною системою охолодження і дозволяє виконати плавне регулювання обертів вентиляторів залежно від температури. Продуктивність і потужність залежить в основному від вихідного транзистора, тести проводилися з вихідними струмами до 2 А, що дозволяє підключити навіть кілька великих вентиляторів на 12 В. Природно можна застосувати цей пристрій і для управління звичайними моторами постійного струму, при необхідності підвищивши напругу живлення. Хоча для вже потужних двигунів доведеться задіяти системи плавного пуску.
Принципова схема регулятора обертів двигуна
Схема складається з двох частин: диференціального підсилювача та стабілізатора напруги. Перша частина займається вимірюванням температури та забезпечує напругу, пропорційну температурі, коли вона перевищує встановлений поріг. Ця напруга є керуючим для стабілізатора напруги, вихід якого контролює живлення вентиляторів.
Схема регулятора обертів електродвигуна постійного струму наведено малюнку. Основа - компаратор U2 (LM393), що працює у цій конфігурації як стандартний операційний підсилювач. Перша його частина U2A працює як диференціальний підсилювач, чиї умови роботи визначають резистори R4-R5 (47k) і R6-R7 (220k). Конденсатор C10 (22pF) покращує стабільність підсилювача, а R12 (10k) підтягує вихід компаратора до плюсу живлення.

На один із входів диференціального підсилювача подається напруга, яка утворюється через дільник, що складається з R2 (6,8k), R3 (680 Ом) та PR1 (500 Ом), і фільтрується за допомогою C4 (100nF). На другий вхід цього підсилювача надходить напруга з датчика температури, який в даному випадку один з гнізда транзистора T1 (BD139), поляризований невеликим струмом за допомогою R1 (6,8k).
Конденсатор C2 (100nF) було додано, щоб фільтрувати напругу з датчика температури. Полярність датчика та дільника опорної напруги задає стабілізатор U1 (78L05) разом з конденсаторами C1 (1000uF/16V), C3 (100nF) та C5 (47uF/25V), надаючи стабілізовану напругу 5 В.
Компаратор U2B працює як класичний підсилювач помилки. Він порівнює напругу з виходу диференціального підсилювача з вихідною напругою за допомогою ланцюжка R10 (3,3k), R11 (47 Ом) та PR2 (200 Ом). Виконавчим елементом стабілізатора є транзистор T2 (IRF5305), база якого керується дільником R8 (10k) та R9 (5,1k).
Конденсатор C6 (1uF) та C7 (22pF) та C9 (10nF) покращують стабільність петлі зворотнього зв'язку. Конденсатор C8 (1000uF/16V) фільтрує вихідна напругаВін має значний вплив на стабільність системи. Роз'єм виходу - AR2 (TB2), а роз'єм живлення - AR1 (TB2).

Завдяки застосуванню вихідного транзистора з низьким опором у відкритому стані, схема має дуже малий падіння напруги - близько 50 мВ при вихідному струмі 1 А, що не вимагає блоку живлення з більш високою напругою для управління вентиляторами, що працюють на 12 В.

Найчастіше в ролі U2 можна застосувати популярний операційний підсилювач LM358, щоправда, трохи погіршивши вихідні параметри.
Складання регулятора
Монтаж слід розпочинати з установки двох перемичок, потім мають бути встановлені всі резистори та дрібні керамічні конденсатори.


У більшості випадків обидва ці елементи будуть встановлені знизу плати на ніжках, вигнутих під кутом 90 градусів. Таке укладання дозволить їх прикрутити безпосередньо до радіатора (обов'язково використовувати ізоляційні прокладки).
Обговорити статтю РЕГУЛЯТОР ОБОРОТІВ ДВИГУНА 12 В
При використанні електродвигуна у різних пристроях та інструментах незмінно виникає необхідність регулювання швидкості обертання валу.
Самостійно зробити регулятор оборотів електродвигуна не складе труднощів. Потрібно лише знайти якісну схему, пристрій якої цілком би підходило до особливостей і типу конкретного електричного двигуна.
Використання частотних перетворювачів
Для регулювання обертів електричного двигуна, що працює від мережі з напругою 220 і 380 Вольт, можуть використовуватися частотні перетворювачі. Високотехнологічні електронні пристрої дозволяють завдяки зміні частоти та амплітуди сигналу плавно регулювати частоту обертання електродвигуна.
В основі таких перетворювачів лежать потужні напівпровідникові транзистори з широкоімпульсними модуляторами.
Перетворювачі за допомогою відповідного блоку управління мікроконтролера дозволяють плавно змінювати показник оборотів двигуна.
Високотехнологічні перетворювачі частоти використовуються у складних та навантажених механізмах. Сучасні частотні регулятори мають одразу кілька ступенів захисту, у тому числі за навантаженням, показником струму напруги та іншими характеристиками. Окремі моделі живляться від електромережі з однофазною напругою 220 Вольт і можуть переробляти напругу трифазні 380 Вольт. Використання таких перетворювачів дозволяє в домашніх умовах використовувати електричні асинхронні двигуни без застосування складних схем підключення.
Застосування електронних регуляторів
Використання потужних асинхронних двигунів неможливе без застосування відповідних регуляторів обертів. Такі перетворювачі використовуються для таких цілей:

Використовувана частотними перетворювачами схема роботи аналогічна більшість побутових приладів. Схожі пристрої також використовуються в зварювальних апаратах, ДБЖ, живленні ПК та ноутбуків, стабілізаторах напруги, блоках розпалювання ламп, а також у моніторах та рідкокристалічних телевізорах.
Незважаючи на складність схеми, що здається, зробити регулятор оборотів електродвигуна 220 В буде досить просто.
Принцип роботи пристрою
Принцип роботи та конструкція регулятора оборотів двигуна відрізняється простотою, тому, вивчивши технічні моменти, цілком під силу виконати їх самостійно. Конструктивно виділяють кілька основних компонентів, з яких складаються регулятори обертання:

Відмінністю асинхронних двигунів від стандартних приводівє обертання ротора з максимальними показниками потужності під час подачі напруги на обмотку трансформатора. На початковому етапі показники споживаного струму і потужність двигуна зростає до максимуму, що призводить до істотного навантаження на привід і його швидкого виходу з ладу.
При запуску двигуна на максимальних оборотах виділяється велика кількість тепла, що призводить до перегріву приводу, обмотки та інших елементів приводу. Завдяки використанню частотного перетворювача можна плавно розганяти двигун, що попереджає перегрів та інші проблеми з агрегатом. Електромотор може при використанні частотного перетворювача запускатися на частоті оборотів 1000 за хвилину, а в подальшому забезпечується плавний розгін, коли кожні 10 секунд додається 100-200 оборотів двигуна.
Виготовлення саморобних реле
 Виготовити саморобний регулятор оборотів електродвигуна 12 В не складе будь-якої праці. Для такої роботи знадобиться таке:
Виготовити саморобний регулятор оборотів електродвигуна 12 В не складе будь-якої праці. Для такої роботи знадобиться таке:
- Дротові резистори.
- Перемикач на кілька положень.
- Блок управління та реле.
Використання дротяних резисторів дозволяє змінювати напругу живлення, відповідно, і частоту обертання двигуна. Такий регулятор забезпечує ступінчастий розгін двигуна, відрізняється простою конструкції і може бути виконаний навіть радіоаматорами-початківцями. Такі найпростіші саморобні ступінчасті регулятори можна використовувати з асинхронними та контактними двигунами.
Принцип роботи саморобного перетворювача:

 У минулому найбільшою популярністю користувалися механічні регулятори, виконані на основі варіатора або шестерні приводу. Однак вони не відрізнялися належною надійністю і часто виходили з ладу.
У минулому найбільшою популярністю користувалися механічні регулятори, виконані на основі варіатора або шестерні приводу. Однак вони не відрізнялися належною надійністю і часто виходили з ладу.
Саморобні електронні регулятори зарекомендували себе з найкращого боку. Вони використовують принцип зміни ступінчастої або плавної напруги, відрізняються довговічністю, надійністю, мають компактні габарити та забезпечують можливість тонкого налаштування роботи приводу.
Додаткове використання в схемах електронних регуляторів симисторів та аналогічних пристроїв дозволяє забезпечити плавну зміну потужності напруги, відповідно електродвигун правильно набиратиме обертів, поступово виходячи на свою максимальну потужність.
Для забезпечення якісного регулювання в схему включаються змінні резистори, які змінюють амплітуду вхідного сигналу, забезпечуючи плавну або ступінчасту зміну числа обертів.
Схема на ШІМ-транзисторі
Регулювати швидкість обертання вала у малопотужних електродвигунів можна за допомогою шин-транзистора та послідовного з'єднання резисторів у живленні. Цей варіант відрізняється простотою реалізації, однак має низький ККД і не дозволяє плавно змінювати швидкість обертання двигуна. Виготовити своїми руками регулятор обертів колекторного двигуна 220 з використанням шим-транзистора не складе особливої складності.
Принцип роботи регулятора на транзисторі:
- Використовувані сьогодні шин-транзистори мають генератор пилкоподібної напруги частотою 150 Герц.
- Операційні підсилювачі використовують у ролі компаратора.
- Зміна швидкості обертання здійснюється за рахунок наявності змінного резистора, керуючого тривалістю імпульсів
Транзистори мають рівну постійну амплітуду імпульсів, ідентичну амплітуді напруги живлення. Це дозволяє виконувати регулювання обертів двигуна 220 і підтримувати роботу агрегату навіть при подачі мінімальної напруги на обмотку трансформатора.
Завдяки можливості підключення мікроконтролера до ШІМ-транзистора забезпечується можливість автоматичного налаштуваннята регулювання роботи електроприводу. Такі схеми виконання перетворювачів можуть мати додаткові компоненти, що розширюють функціональні можливостіприводу, забезпечуючи роботу повністю автоматичному режимі.
Впровадження автоматичних систем керування
Наявність в регуляторах і частотних перетворювачах мікроконтролерного управління дозволяє поліпшити параметри роботи приводу, а сам мотор може працювати в автоматичному режимі, коли використовуваний контролер плавно або ступінчасто змінює показники частоти обертання агрегату. Сьогодні як мікроконтролерне управління використовуються процесори, які мають відмінне число виходів і входів. До такого мікроконтролера можна підключити різні електронні ключі, кнопки, всілякі датчики втрати сигналу тощо.
 У продажу можна знайти різні типимікроконтролерів, які відрізняються простотою у використанні, гарантують якісне налаштування роботи перетворювача і регулятора, а наявність додаткових входів і виходів дозволяє підключати до процесора різні додаткові датчики, за сигналом яких пристрій буде зменшувати або збільшувати число обертів або повністю припиняти подачу напруги на обмотки електродвигуна.
У продажу можна знайти різні типимікроконтролерів, які відрізняються простотою у використанні, гарантують якісне налаштування роботи перетворювача і регулятора, а наявність додаткових входів і виходів дозволяє підключати до процесора різні додаткові датчики, за сигналом яких пристрій буде зменшувати або збільшувати число обертів або повністю припиняти подачу напруги на обмотки електродвигуна.
Сьогодні у продажу є різні перетворювачі та регулятори електродвигуна. Втім, за наявності навіть мінімальних навичок роботи з радіодеталями та вмінні читати схеми можна виконати такий найпростіший пристрій, який плавно або ступінчасто змінюватиме обороти двигуна. Додатково можна включити в ланцюг керуючий симисторний реостат і резистор, що дозволить плавно змінювати оберти, а наявність контролерного управління повністю автоматизує використання електричних двигунів.
Найбільш простий метод регулювання швидкості обертання двигуна постійного струму заснований на використанні широтно імпульсної модуляції (ШІМ або PWM). Суть цього методу у тому, що напруга живлення подається двигун у вигляді імпульсів. У цьому частота слідування імпульсів залишається постійної, які тривалість може змінюватися.
ШИМ сигнал характеризується таким параметром, як коефіцієнт заповнення або Duty cycle. Це величина зворотна шпаруватості і дорівнює відношенню тривалості імпульсу до його періоду.
D = (t/T) * 100%
На рисунках нижче зображені ШІМ сигнали з різними коефіцієнтами наповнення.
За такого методу управління швидкість обертання двигуна буде пропорційна коефіцієнту заповнення ШІМ сигналу.
Проста схема керування двигуном постійного струму
Найпростіша схема управління двигуном постійного струму складається з польового транзистора, на затвор якого подається ШІМ сигнал. Транзистор у цій схемі виконує роль електронного ключа, що комутує один із висновків двигуна на землю. Транзистор відкривається на момент тривалості імпульсу.

Як поводитиметься двигун у такому включенні? Якщо частота ШІМ сигналу буде низькою (одиниці Гц), двигун повертатиметься ривками. Це буде особливо помітно при невеликому коефіцієнті заповнення ШІМ сигналу.
При частоті в сотні Гц двигун обертатиметься безперервно і його швидкість обертання буде змінюватися пропорційно коефіцієнту заповнення. Грубо кажучи, двигун "сприйматиме" середнє значення енергії, що підводиться до нього.
Схема для генерації ШІМ сигналу
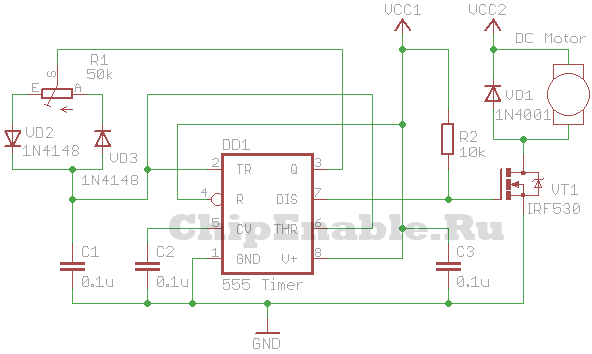
Існує багато схем для генерації ШІМ сигналу. Одна з найпростіших – це схема на основі 555-го таймера. Вона вимагає мінімум компонентів, не потребує налаштування та збирається за одну годину.

Напруга живлення схеми VCC може бути в діапазоні 5 – 16 Вольт. Як діоди VD1 - VD3 можна взяти практично будь-які діоди.
Якщо цікаво розібратися, як працює ця схема, потрібно звернутися до блоку схеми 555-го таймера. Таймер складається з дільника напруги, двох компараторів, тригера, ключа з відкритим колектором та вихідного буфера.

Виведення живлення (VCC) та скидання (Reset) у нас заведено на плюс харчування, припустимо, +5 В, а земляний (GND) на мінус. Відкритий колектор транзистора (висновок DISCH) підтягнутий до плюсу живлення через резистор і з нього знімається ШИМ сигнал. Виведення CONT не використовується, до нього підключено конденсатор. Висновки компараторів THRES і TRIG об'єднані та підключені до RC ланцюжка, що складається зі змінного резистора, двох діодів та конденсатора. Середній вивід змінного резистора підключено до виводу OUT. Крайні висновки резистора підключені через діоди до конденсатора, який під'єднаний другим висновком до землі. Завдяки такому включенню діодів, конденсатор заряджається через одну частину змінного резистора, а розряджається через іншу.
У момент включення живлення на виводі OUT низький логічний рівень, тоді на висновках THRES і TRIG завдяки діоду VD2 теж буде низький рівень. Верхній компаратор переключить вихід на нуль, а нижній на одиницю. На виході тригера встановиться нульовий рівень (оскільки має інвертор на виході), транзисторний ключ закриється, але в висновку OUT встановиться високий рівень (оскільки в нього інвертор на вході). Далі конденсатор С3 почне заряджатися через діод VD1. Коли вона зарядиться до певного рівня, нижній компаратор перейде в нуль, а потім верхній компаратор переключить вихід в одиницю. На виході тригера встановиться одиничний рівень, транзисторний ключ відкриється, а виведенні OUT встановиться низький рівень. Конденсатор C3 почне розряджатися через діод VD2, доки повністю не розрядиться і компаратори не переключать тригер в інший стан. Далі цикл повторюватиметься.
Приблизну частоту ШІМ сигналу, що формується цією схемою, можна розрахувати за такою формулою:
F = 1.44 / (R1 * C1), [Гц]
де R1 у омах, C1 у фарадах.
При номіналах зазначених на схемі вище, частота ШІМ сигналу дорівнюватиме:
F = 1.44 / (50000 * 0.0000001) = 288 Гц.
ШИМ регулятор обертів двигуна постійного струму
Об'єднаємо дві представлені вище схеми, і ми отримаємо просту схемурегулятора оборотів двигуна постійного струму, яку можна застосувати для управління оборотами двигуна іграшки, робота, мікродриля тощо.
VT1 - польовий транзистор n-типу, здатний витримувати максимальний струм двигуна при заданій напрузі та навантаженні на валу. VCC1 від 5 до 16 В, VCC2 більше або дорівнює VCC1.
Замість польового транзистора можна використовувати біполярний n-p-n транзистор, транзистор дарлінгтона, оптореле відповідної потужності
Регулятор оборотів у двигуні потрібен для здійснення плавного розгону та гальмування. Широкого поширення набули такі прилади у сучасній промисловості. Завдяки їм відбувається вимірювання швидкості руху в конвеєрі, на різних пристроях, а також при обертанні вентилятора. Двигуни з продуктивністю на 12 Вольт застосовуються в цілих системах керування та в автомобілях.
Влаштування системи
Колекторний тип двигунаскладається головним чином із ротора, статора, а також щіток та тахогенератора.
- Ротор - це частина обертання, статор - зовнішній за типом магніт.
- Щітки, які виготовлені з графіту - це головна частина ковзного контакту, через яку на якір і варто подавати напругу.
- Тахогенератор - це пристрій, який стежить за характеристикою обертання приладу. Якщо відбувається порушення в розміреності процесу обертання, то він коригує рівень напруги, що надходить у двигун, тим самим роблячи його найбільш плавним і повільним.
- Статор. Така деталь може включати не один магніт, а, наприклад, дві пари полюсів. Разом з цим на місці статичних магнітів тут будуть котушки електромагнітів. Робити такий пристрій здатний як від постійного струму, так і від змінного.
Схема регулятора обертів колекторного двигуна
 У вигляді регуляторів оборотів електродвигунів 220 і 380 В застосовуються спеціальні частотні перетворювачі . Такі пристрої відносять до високотехнологічних, вони допомагають зробити кардинальне перетворення характеристики струму (форму сигналу, і навіть частоту). У їхній комплектації є потужні напівпровідникові транзистори, а також широтно-імпульсний модулятор. Весь процес здійснення роботи пристрою відбувається за допомогою керування спеціальним блоком на мікроконтролері. Зміна швидкості обертання ротора двигунів відбувається досить повільно.
У вигляді регуляторів оборотів електродвигунів 220 і 380 В застосовуються спеціальні частотні перетворювачі . Такі пристрої відносять до високотехнологічних, вони допомагають зробити кардинальне перетворення характеристики струму (форму сигналу, і навіть частоту). У їхній комплектації є потужні напівпровідникові транзистори, а також широтно-імпульсний модулятор. Весь процес здійснення роботи пристрою відбувається за допомогою керування спеціальним блоком на мікроконтролері. Зміна швидкості обертання ротора двигунів відбувається досить повільно.
Саме тому частотні перетворювачі застосовуються в навантажених пристроях. Чим повільніше відбуватиметься процес розгону, тим менше навантаження буде виконано на редуктор, а також конвеєр. У всіх частотниках можна знайти кілька ступенів захисту: за навантаженням, струмом, напругою та іншими показниками.
Деякі моделі частотних перетворювачів здійснюють живлення від однофазової напруги (воно буде доходити до 220 Вольт), створюють із нього трифазове. Це допомагає здійснити підключення асинхронного двигуна в домашніх умовах без застосування особливо складних схем та конструкцій. При цьому споживач може не втратити потужність під час роботи з таким приладом.
Навіщо використовують такий прилад-регулятор
Якщо говорити про двигуни регуляторів, то обороти потрібні:

Схеми, якими відбувається створення частотних перетворювачів в електродвигуні, широко застосовують у більшості побутових пристроїв. Таку систему можна знайти в джерелах бездротового живлення, зварювальних апаратах, зарядках телефону, блоках живлення персонального комп'ютерата ноутбука, стабілізаторах напруги, блоках розпалювання ламп для підсвічування сучасних моніторів, а також РК-телевізорів.
Регулятор обертів електродвигуна 220в
Його можна виготовити абсолютно самостійноАле для цього потрібно буде вивчити всі можливі технічні особливості приладу. По конструкції можна назвати відразу кілька різновидів основних деталей. А саме:
- Сам електродвигун.
- Мікроконтролерна система керування блоку перетворення.
- Привід та механічні деталі, пов'язані з роботою системи.
 Перед початком запуску пристрою, після подачі певної напруги на обмотки, починається процес обертання двигуна з максимальним показником потужності. Саме така особливість і відрізнятиме асинхронні пристрої від інших видів. До того ж відбувається збільшення навантаження від механізмів, які приводять прилад в рух. У кінцевому рахунку на початковому етапі роботи пристрою потужність, а також споживаний струм лише зростають до максимальної позначки.
Перед початком запуску пристрою, після подачі певної напруги на обмотки, починається процес обертання двигуна з максимальним показником потужності. Саме така особливість і відрізнятиме асинхронні пристрої від інших видів. До того ж відбувається збільшення навантаження від механізмів, які приводять прилад в рух. У кінцевому рахунку на початковому етапі роботи пристрою потужність, а також споживаний струм лише зростають до максимальної позначки.
Саме тоді відбувається процес виділення найбільшої кількості тепла. Відбувається перегрів в обмотках, а також у дротах. Використання часткового перетвореннядопоможе не допустити цього. Якщо зробити установку плавного пуску, то до максимальної позначки швидкості (яка також може регулюватися обладнанням і може бути не 1500 оборотів за хвилину, а лише 1000) двигун почне розганятися не в перший момент роботи, а протягом наступних 10 секунд (при цьому на кожну секунду пристрій додаватиме по 100-150 оборотів). У цей час процес навантаження на всі механізми та дроти починає зменшуватися у кілька разів.
Як зробити регулятор своїми руками
Можна повністю самостійно створити регулятор обертів електродвигуна близько 12 В. Для цього варто використати перемикач відразу кількох положень, а також спеціальний дротяний резистор. За допомогою останнього відбувається зміна рівня напруги живлення (а разом з цим показника частоти обертання). Такі ж системи можна застосовувати і для здійснення асинхронних рухів, але вони будуть менш ефективними.
Ще багато років тому широко використовувалися механічні регулятори - вони були побудовані на основі шестерних приводів або їх варіаторів. Але такі пристрої вважалися не надто надійними. Електронні засоби показували себе в кілька разів краще, оскільки вони були не такими великими і дозволяли налаштовувати більш тонкий привод.
Для того, щоб створити регулятор обертання електродвигуна, варто використовувати відразу кілька пристроїв, які можна або купити в будь-якому будівельному магазині, або зняти зі старих інвенторних пристроїв. Щоб здійснити процес регулювання, варто увімкнути спеціальну схему змінного резистора. З його допомогою відбувається процес зміни амплітуди сигналу, що входить на резистор.
Впровадження системи управління
 Щоб значно покращити характеристику навіть найпростішого обладнання, варто у схему регулятора обертів двигуна підключити мікроконтролерне керування. Для цього варто вибрати той процесор, в якому є відповідна кількість входів і виходів відповідно: для підключення датчиків, кнопок, а також спеціальних електронних ключів.
Щоб значно покращити характеристику навіть найпростішого обладнання, варто у схему регулятора обертів двигуна підключити мікроконтролерне керування. Для цього варто вибрати той процесор, в якому є відповідна кількість входів і виходів відповідно: для підключення датчиків, кнопок, а також спеціальних електронних ключів.
Для здійснення експериментів варто використати особливий мікроконтролер AtMega 128- це найпростіший у застосуванні та широко використовується контролер. У вільному використанні можна знайти велике числосхем із його застосуванням. Щоб пристрій робив правильну роботу, в нього варто записати певний алгоритмдій - відгуки певні руху. Наприклад, при досягненні температури 60 градусів Цельсія (замір буде відзначатись на графіку самого пристрою), має відбутися автоматичне відключенняроботи пристрою.
Регулювання роботи
Тепер варто поговорити про те, як можна здійснити регулювання обертів колекторного двигуна. У зв'язку з тим, що загальна швидкість обертання мотора може безпосередньо залежати від величини напруги, що подається, для цього цілком придатні абсолютно будь-які системи для регулювання, які можуть здійснювати таку функцію.
Варто перерахувати кілька різновидів приладів:
- Лабораторні автотрансформери (ЛАТР).
- Заводські плати регулювання, що застосовуються у побутових пристроях (можна взяти навіть ті, що використовуються у пилососах, міксерах).
- Кнопки, що застосовуються у конструкції електроінструментів.
- Побутові різновиди регуляторів, що оснащені особливою плавною дією.
 Але при цьому всі такі способи мають певну ваду. Спільно з процесами зменшення обертів зменшується загальна потужність роботи мотора. Іноді його можна зупинити, навіть доторкнувшись рукою. У деяких випадках це може бути цілком нормальним, але здебільшого це вважається серйозною проблемою.
Але при цьому всі такі способи мають певну ваду. Спільно з процесами зменшення обертів зменшується загальна потужність роботи мотора. Іноді його можна зупинити, навіть доторкнувшись рукою. У деяких випадках це може бути цілком нормальним, але здебільшого це вважається серйозною проблемою.
Найбільш прийнятним варіантом стане виконання функції регулювання обертів за допомогою застосування тахогенератора.
Його найчастіше встановлюють на заводі. Під час відхилення швидкості обертання моторів через симистри в моторі відбуватиметься передача вже відкоригованого електроживлення, що супроводжує потрібну швидкість обертання. Якщо в таку ємність буде вбудоване регулювання обертання самого двигуна, то потужність не буде втрачена.
Як це виглядає у вигляді конструкції? Найбільше використовується саме реостатне регулювання процесу обертання, яке створене на основі застосування напівпровідника.
У першому випадкумова піде про змінний опір із використанням механічного процесу регулювання. Вона буде послідовно підключена до колекторного електродвигуна. Недоліком у цьому випадку стане додаткове виділення певної кількості тепла та додаткова витрата ресурсу всього акумулятора. Під час такого регулювання відбувається загальна втрата потужності в процесі обертання двигуна. Він вважається найбільш економічним варіантом. Не використовується для досить потужних двигунів з вищевказаних причин.
У другому випадкупід час застосування напівпровідників відбувається процес керування двигуном за допомогою подачі певного числа імпульсів. Схема здатна здійснювати зміну тривалості таких імпульсів, що, своєю чергою, змінюватиме загальну швидкість обертання мотора без втрати показника потужності.
 Якщо ви не хочете самостійно виготовляти обладнання, а хочете купити вже повністю готовий до застосування пристрій, то варто звернути особливу увагу на основні параметри та характеристики, такі як потужність, тип системи управління приладом, напруга в пристрої, частоту, а також напруга робочого типу . Найкраще буде робити розрахунок загальних характеристиквсього механізму, у якому варто застосовувати регулятор загальної напруги двигуна. Варто пам'ятати, що необхідно робити зіставлення з параметрами частотного перетворювача.
Якщо ви не хочете самостійно виготовляти обладнання, а хочете купити вже повністю готовий до застосування пристрій, то варто звернути особливу увагу на основні параметри та характеристики, такі як потужність, тип системи управління приладом, напруга в пристрої, частоту, а також напруга робочого типу . Найкраще буде робити розрахунок загальних характеристиквсього механізму, у якому варто застосовувати регулятор загальної напруги двигуна. Варто пам'ятати, що необхідно робити зіставлення з параметрами частотного перетворювача.
Ще один електронний пристрій широкого застосування.
Є потужним ШИМ (PWM) регулятором з плавним ручним управлінням. Працює на постійній напрузі 10-50V (краще не виходити за діапазон 12-40V) та підходить для регулювання потужності різних споживачів (лампи, світлодіоди, двигуни, нагрівачі) з максимальним струмом споживання 40А.
Надіслали у стандартному м'якому конверті 

Корпус скріплюється на клямках, які легко ламаються, тому розкривати акуратно. 
Всередині плата та знята ручка регулятора 
Друкована плата - двосторонній склотекстоліт, паяння та монтаж акуратні. Підключення через потужний клемник. 

Вентиляційні прорізи у корпусі малоефективні, т.к. майже повністю перекриваються друкарською платою. 
У зібраному вигляді виглядає приблизно так 
Реальні розміри трохи більше заявлених: 123x55x40мм
Принципова електрична схемапристрої 
Заявлена частота ШІМ 12kHz. Реальна частота змінюється у діапазоні 12-13kHz при регулюванні вихідної потужності.
При необхідності частоту роботи ШІМ можна зменшити, підпаявши потрібний конденсатор паралельно С5 (вихідна ємність 1nF). Збільшувати частоту небажано, тому що. збільшаться комутаційні втрати.
Змінний резистор має вбудований вимикач у крайньому лівому положенні, що дозволяє вимикати пристрій. Також на платі розташований червоний світлодіод, що горить у робочому стані регулятора.
З мікросхеми ШІМ контролера маркування навіщось старанно затерта, хоча неважко здогадатися, що варто аналог NE555:)
Діапазон регулювання близький до заявлених 5-100%
Елемент CW1 схожий на стабілізатор струму в корпусі діода, але точно не впевнений.
Як і більшості регуляторів потужності, регулювання здійснюється по мінусовому провіднику. Захист від КЗ відсутній.
На мосфетах та діодному складанні маркування спочатку відсутнє, вони стоять на індивідуальних радіаторах з термопастою.
Регулятор може працювати індуктивну навантаження, т.к. на виході стоїть складання захисних діодів Шоттки, що пригнічує ЕРС самоіндукції.
Перевірка струмом 20А показала, що радіатори незначно гріються і можуть витягнути більше, імовірно до 30А. Виміряний сумарний опір відкритих каналів полевиків всього 0,002 Ом (падає 0,04 на струмі 20А).
Якщо знизити частоту ШІМ, витягнуть усі заявлені 40А. Шкода перевірити не зможу.
Висновки можете зробити самі, мені пристрій сподобався:)
Планую купити +56 Додати в обране Огляд сподобався +38 +85 Принтери